



Quadcopter FX Simulator



Descrição do Quadcopter FX Simulator
A Quadcopter / Multirotor RC Drone simulator with First Person View (FPV), HUD, Return Home, Course Lock, Home Lock, Camera Gimbal, Acro mode, Acro 3D mode and more..
Now Google Cardboard VR is also supported for immersive flying and FPV experience.
Support for Controllers
Please note that this a simulator and Not a game. It is designed for RC enthusiasts to practice Flying skills.
Basic Tutorial for beginner is in the above description video.
Minimum Screen resolution required is 800 x 480 px. Minimum Recommended RAM is 1 GB. We are open to suggestions and problems. You can always email us at our support email.
Features:
1) Based on real physics Model of Quadcopter
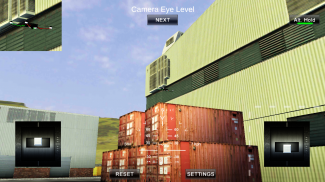
2) Interactive selection of different cameras modes:
* Eye level Camera
* First Person View Camera
* Stabilized Gimbal Camera
* Follow Camera
You can walk around while flying, looking at the quad either by dragging the middle of screen or by enabling accelerometer button on the left side in the Eye level Camera Mode..
3) Return to Location (RTL)
When on the Quad will automatically Return and Land back in its Landing Position. It will Automatically switch on when the Quad goes out of range.
4) Position Hold
When ON the Quad will try to Hold its position when both control sticks are released.
5) Course Lock
When ON the Forward, Backward, Left and Right will remain same regardless of orientation of Quad. e.g. Moving Right stick Forward will always make the Quad go forward in East Direction even if its pointing towards north.
6) Home Lock
When ON the Forward will always be Away from you and Backwards will always be towards you regardless of Quads Orientation.
7) Heads up Display(HUD)
Displaying real-time Pitch, Roll, Heading, Altitude and Speed.
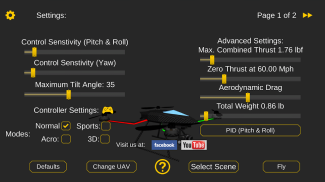
8) Adjustable Control sensitivity Settings
9) Auto Stabilizing adjustable
10) Altitude Hold Switch
If ON the quad will try to maintain the altitude when it was switched on.
11) Advanced Settings
If enabled users can change the Total Weight, Static / Dynamic thrust, PID setting and Aerodynamic Drag values.
12) Multiple Quad / Scene Selection / Some basic Challenges for Time Pass..
13) Multiple mode Input Support.
Now it supports mode1, mode2. mode3, mode4 and accelerometers. You can change via settings page
14) Camera rotation in FPV and Gimbal camera.
Click and Drag from center of screen on FPV or Gimbal camera. Double click in center to reset.
15) Dynamic Wind
Wind effect will reduce when behind the building.
16) Google cardboard Support for immersive virtual reality and FPV experience.
Make sure that you have a controller attached to the device because the only way you can control the quadcopter is by controller once the Cardboard VR is enabled. After enabling you have to gaze at the buttons on the UI and press the trigger button on the cardboard to click it. Once you are flying then pressing the trigger anywhere will open the settings page. You can also touch on screen anywhere to execute trigger event instead of pressing the trigger button.
17) Max Tilt Angle / Auto Stabilize Sensitivity Slider
In Normal Mode the slider changes the Maximum Tilt angle setting. This settings determines the maximum roll / pitch angle the quadcopter will tilt. In Sports Mode it changes the Auto Stabilize sensitivity. The higher the settings the more force is applied to stabilize the quadcopter.
18) Acro / Acro 3d mode for expert flying
Auto stabilize will not be applied in these modes. You need to be expert to fly in this mode.In 3D Mode is mode in which the Quadcopter can fly upside down also. The throttle sticks will produce reverse thrust when moved down from the center position.
Enjoy Flying..
Credits: Some Arteria content is in use.
</div> <div jsname="WJz9Hc" style="display:none">Um simulador Quadrotor / Multirotor RC Drone com First Person View (FPV), HUD, voltar para casa, Curso Lock, Casa Lock, Câmara Gimbal, modo de Acro, modo de Acro 3D e muito mais ..
Agora, o Google Papelão VR também é suportado para o vôo e imersiva experiência FPV.
Suporte para controladores
Por favor, note que este um simulador e não um jogo. Ele é projetado para entusiastas de RC para a prática de habilidades de vôo.
Tutorial Básico para iniciantes está no vídeo descrição acima.
Resolução de tela mínima exigida é de 800 x 480 px. RAM mínima recomendada é de 1 GB. Estamos abertos a sugestões e problemas. Você sempre pode enviar um email para o nosso e-mail de apoio.
Características:
1) Com base no verdadeiro modelo de física de Quadrotor
2) seleção interativo de diferentes modos de câmeras:
* Nível Eye Camera
* First Person View Camera
* Estabilizada Camera Gimbal
* Siga Câmara
Você pode andar por aí durante o vôo, olhando para o quad arrastando o meio da tela ou ativando botão acelerômetro no lado esquerdo no modo de nível Camera Eye ..
3) Voltar à Localização (RTL)
Quando no Quad retornará automaticamente e Terra de volta em sua posição Landing. Ele liga automaticamente quando o Quad sair de alcance.
4) posição HOLD
Quando ON da Quad vai tentar manter sua posição quando ambas as varas de controle são liberados.
5) Curso de bloqueio
Quando ON a frente, para trás, esquerda e direita permanecerá mesmo, independentemente da orientação do Quad. por exemplo. Movendo stick direito Atacante sempre vai fazer o Quad ir para a frente em direção Leste, mesmo que seu apontando para o norte.
6) Casa Bloqueio
Quando ON da Atacante sempre vai estar longe de você e sempre será para trás em direção a você, independentemente de Quads Orientação.
7) Heads Up Display (HUD)
Resultados em tempo real de Pitch, Roll, rumo, altitude e velocidade.
8) Configurações de sensibilidade de controle ajustável
9) Auto estabilizadoras ajustáveis
10) Alternar Altitude espera
Se por quad vai tentar manter a altitude quando foi ligado.
11) Configurações avançadas
Se os usuários habilitados podem alterar o peso total, estático / dinâmico impulso, configuração PID e valores de arrasto aerodinâmico.
12) Multiple Selection Quad / Cena / Alguns desafios básicos para a passagem de tempo ..
13) Suporte a vários modo de entrada.
Agora ele suporta mode1, mode2. mode3, mode4 e acelerômetros. Você pode alterar via página de definições
14) rotação da câmera no FPV e câmera cardan.
Clique e arraste do centro da tela em FPV ou câmera cardan. Dê um clique duplo no centro para repor.
15) Wind Dinâmico
Efeito do vento irá reduzir, quando trás do edifício.
16) Suporte do Google papelão para realidade virtual imersiva e experiência FPV.
Certifique-se de que você tem um controlador ligado ao dispositivo porque a única maneira que você pode controlar o Quadrotor é pelo controlador uma vez que o cartão VR está habilitado. Após permitindo que você tem que olhar para os botões na interface do usuário e pressione o botão de disparo sobre o papelão para clicar nele. Uma vez que você está voando em seguida, pressionando o gatilho em qualquer lugar vai abrir a página de configurações. Você também pode tocar em qualquer lugar na tela para executar evento de disparo em vez de pressionar o botão de disparo.
17) Max Tilt Angle / Auto Estabilizar Sensibilidade Slider
No modo Normal o controle deslizante muda a configuração de ângulo de inclinação máxima. Esta configuração determina o ângulo máximo de rotação / inclinação do Quadrotor irá inclinar. No Modo Sports muda o Auto Estabilizar sensibilidade. Quanto maior a configurações mais força é aplicada para estabilizar a Quadrotor.
18) Modo de Acro / Acro 3d para o vôo especialista
Estabilizar automática não será aplicada nesses modos. Você precisa ser especialista para voar neste modo 3D mode.In é o modo em que o Quadrotor pode voar de cabeça para baixo também. As varas do acelerador irá produzir o impulso invertido quando movido para baixo a partir da posição central.
Desfrute de vôo ..
Créditos: Alguns conteúdos Arteria está em uso.</div> <div class="show-more-end">
Quadcopter FX Simulator - Versão 1.75c
(23-08-2019)

Quadcopter FX Simulator - Informações do APK
Versão do APK: 1.75cPacote: com.Creativeworld.QuadcopterFXÚltima versão de Quadcopter FX Simulator









 3.64
3.64



Apps na mesma categoria

Você também poderá gostar...







